MetamorphX
Table of Contents
For more information, check the first author’s website.
About #
Humans can estimate the properties of wielded objects (e.g., inertia and viscosity) using the force applied to the hand. We focused on this mechanism and aimed to represent the properties of wielded objects by dynamically changing the force applied to the hand. We propose MetamorphX, which uses control moment gyroscopes (CMGs) to generate ungrounded, 3-degrees of freedom moment feedback. The high-response moments obtained CMGs allow the inertia and viscosity of motion to be set to the desired values via impedance control. A technical evaluation indicated that our device can generate a moment with a 60-ms delay. The inertia and viscosity of motion were varied by 0.01 kgm2 and 0.1 Ns, respectively. Additionally, we demonstrated that our device can dynamically change the inertia and viscosity of motion through virtual reality applications.
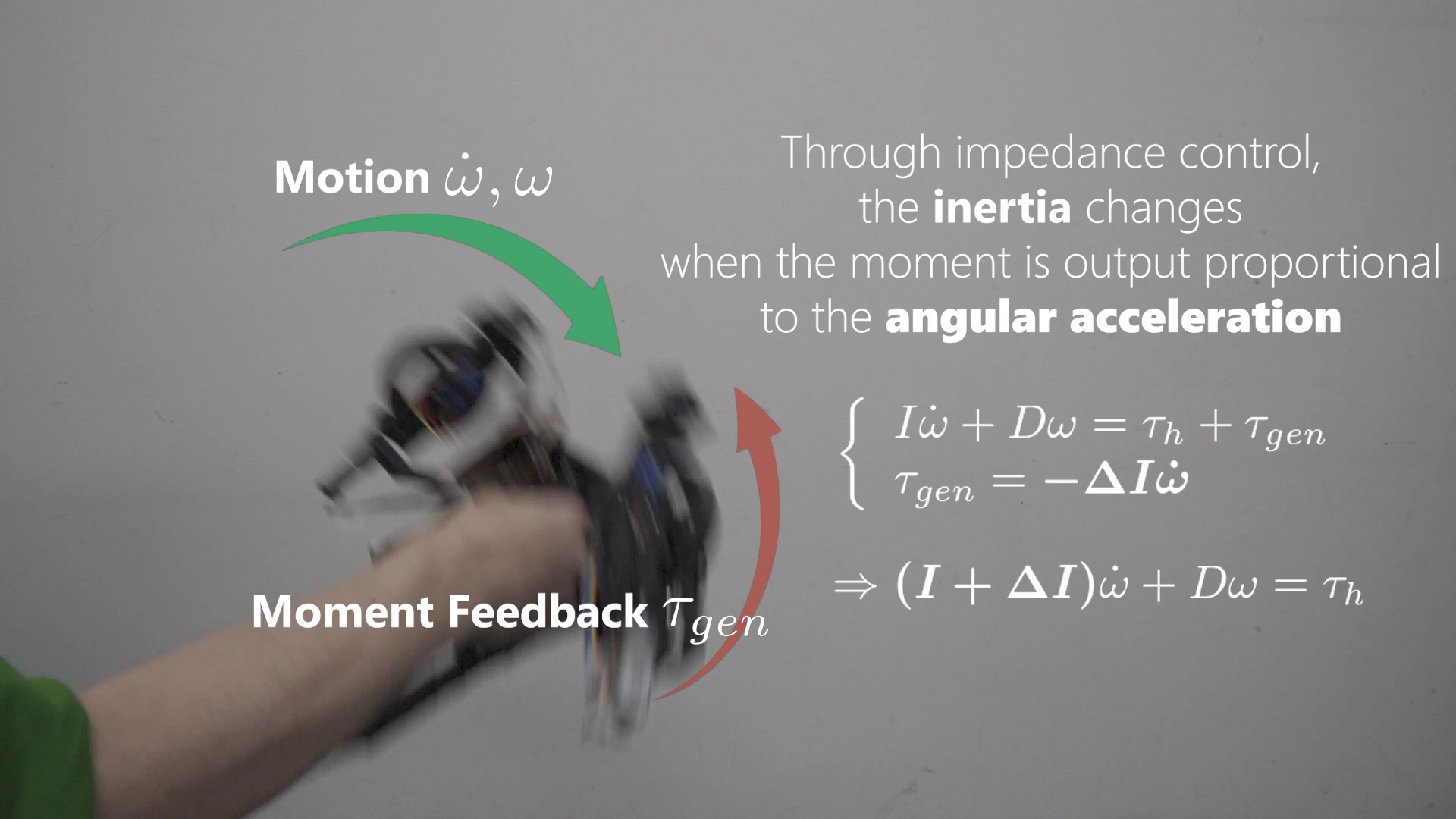
MetamorphX can present a change in moment of inertia by presenting a moment feedback proportional to the angular acceleration in response to one’s motion.
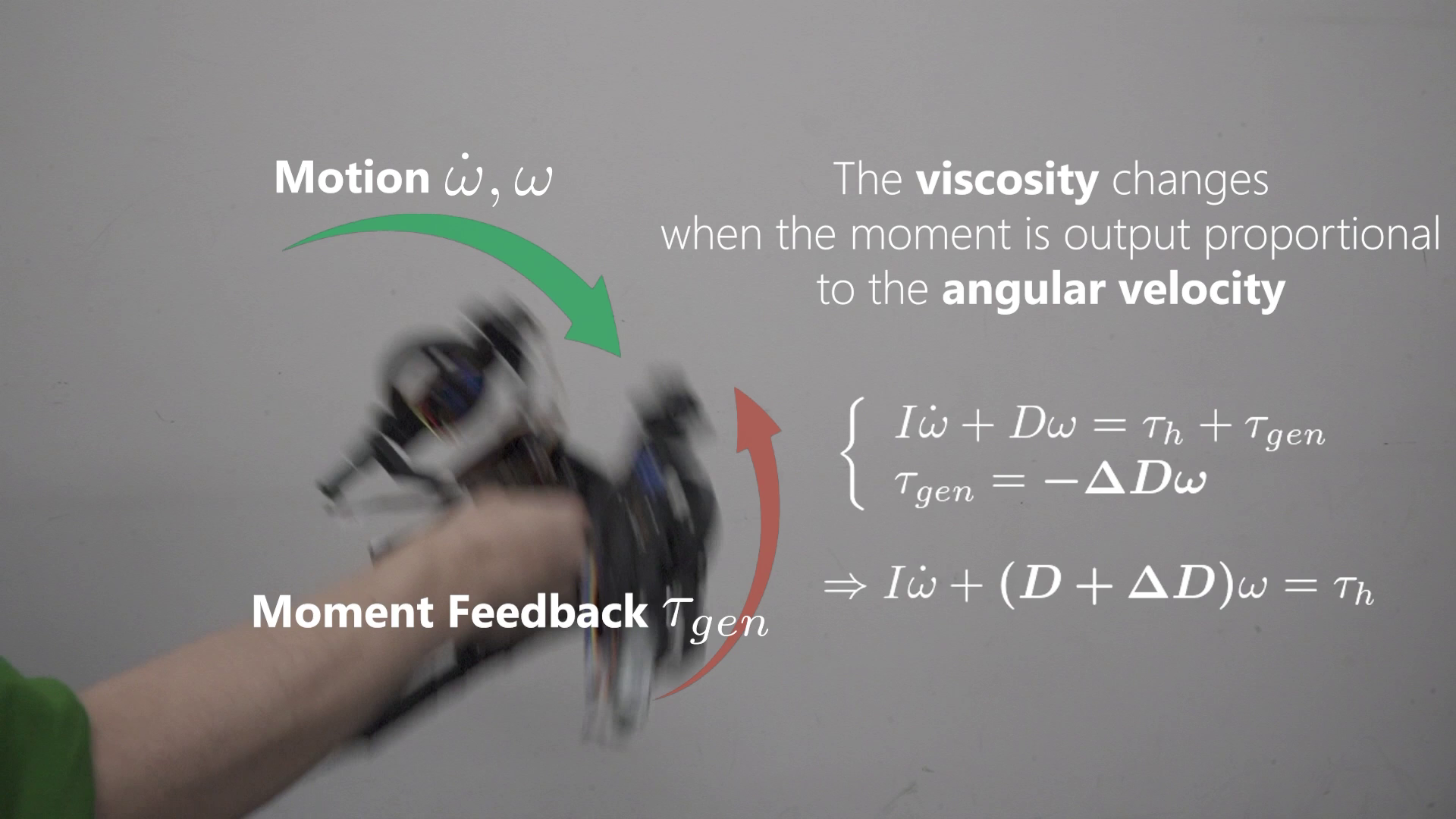
MetamorphX can present a change in viscosity by presenting a moment feedback proportional to the angular velocity in response to one’s motion.
Publications #
- Takeru Hashimoto, Shigeo Yoshida, and Takuji Narumi. 2022. MetamorphX: An Ungrounded 3-DoF Moment Display that Changes its Physical Properties through Rotational Impedance Control. In Proceedings of the 35th Annual ACM Symposium on User Interface Software and Technology (UIST ‘22). Association for Computing Machinery, New York, NY, USA, Article 72, 1–14. https://doi.org/10.1145/3526113.3545650
Awards and Honors #
- ACM UIST 2022 Best Demo Honorable Mention, 3 Nov. 2022.
- Virtual Reality Society of Japan Young Researchers Award (First author)、Mar. 2019.
Related Projects #