- 研究/
MetamorphX
目次
詳しくは、 第一著者のwebページをご覧ください。
About #
ヒトは手にかかる力を利用して、振り回す物体の特性(慣性力や粘性など)を推定することができます。 本研究はこのメカニズムに着目し、手に加える力を動的に変化させることで、振り回す物体の物理的な特性を表現することを目指しました。 我々が作成した「MetamorphX」は、Control Moment Gyroscopes (CMG)を用いて、接地していない3自由度のトルクフィードバックを生成する力覚提示装置です。 ヒトの運動の角加速度や角速度に応じた力のフィードバックを作り出すことで、運動の慣性モーメントや粘性抵抗を変化させることが可能であることを明らかにしました。 また、性能評価を通して本装置は、運動の見かけの慣性モーメントと粘性抵抗をそれぞれ0.01kgm2と0.1Ns変化させられることがわかりました。
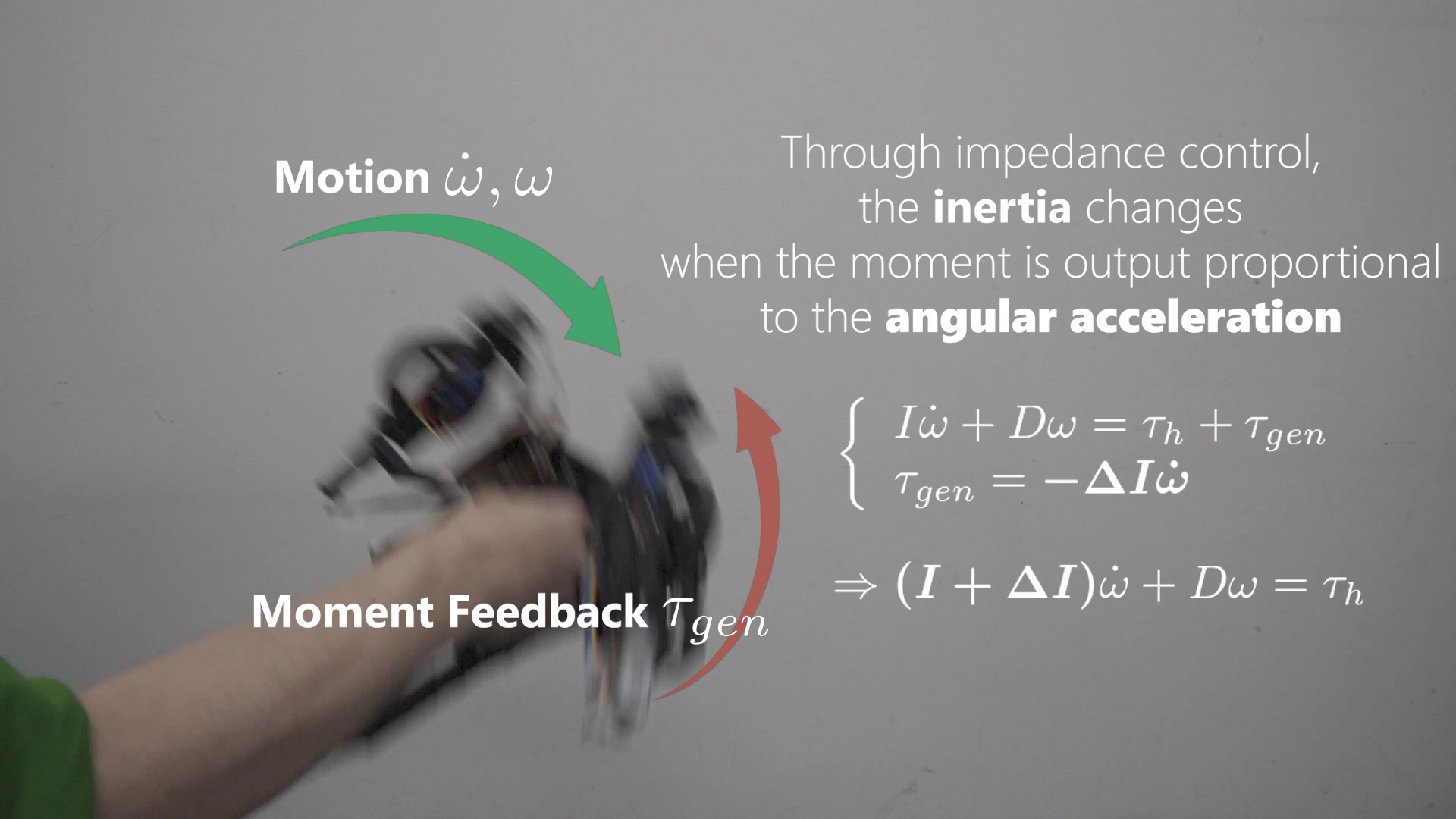
運動に応じて、角加速度に比例したトルクフィードバックを提示することにより、慣性モーメントの変化を提示します。
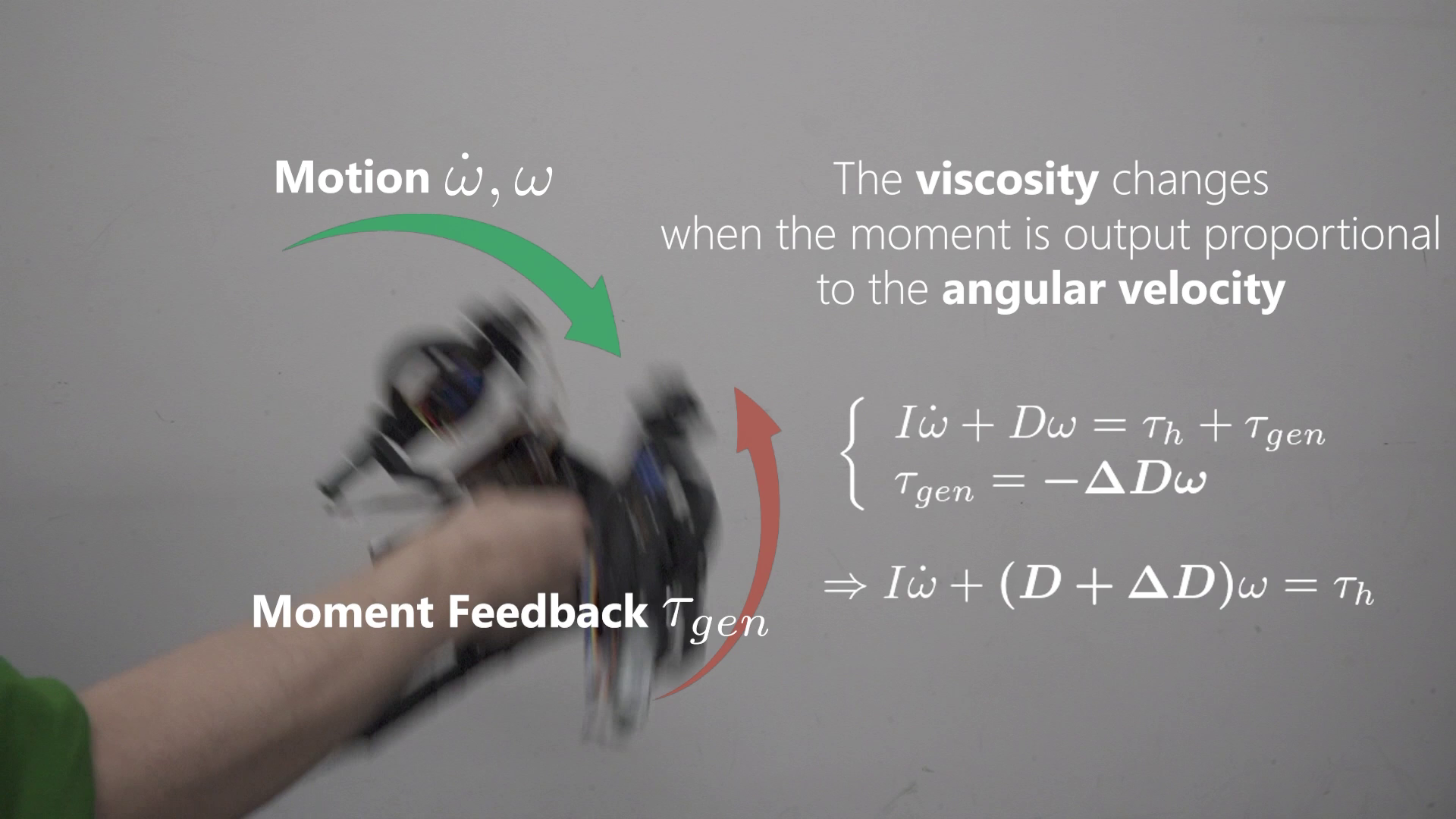
また、運動に応じて、角速度に比例したトルクフィードバックを提示することにより、粘性抵抗の変化を提示します。
Publications #
-
Takeru Hashimoto, Shigeo Yoshida, and Takuji Narumi. 2022. MetamorphX: An Ungrounded 3-DoF Moment Display that Changes its Physical Properties through Rotational Impedance Control. In Proceedings of the 35th Annual ACM Symposium on User Interface Software and Technology (UIST ‘22). Association for Computing Machinery, New York, NY, USA, Article 72, 1–14. https://doi.org/10.1145/3526113.3545650
-
橋本健、吉田成朗、鳴海拓志:多様な物理特性を提示するトルクフィードバックVRコントローラ:第2報、第27回バーチャルリアリティ学会大会(VRSJ2022)、2022年9月 https://conference.vrsj.org/ac2022/program/doc/1F5-4.pdf
-
橋本健、吉田成朗、鳴海拓志、廣瀬通孝:多様な形状知覚を提示するトルクフィードバックVRコントローラ、第24回バーチャルリアリティ学会大会(VRSJ2019)、2019年9月 https://conference.vrsj.org/ac2019/program/common/doc/pdf/6A-09.pdf
Awards and Honors #
- ACM UIST 2022 Best Demo Honorable Mention, 3 Nov. 2022.
- 日本バーチャルリアリティ学会 第24回大会学術奨励賞(展示部門)(第一著者)、2019年3月
Related Projects #