Swarm Body
Table of Contents
30sec preview Blog Robot’s Hardware & Software
About #
The human brain’s plasticity allows for the integration of artificial body parts into the human body. Leveraging this, embodied systems realize intuitive interactions with the environment. We introduce a novel concept: embodied swarm robots. Swarm robots constitute a collective of robots working in harmony to achieve a common objective, in our case, serving as functional body parts.
Embodied swarm robots can dynamically alter their shape, density, and the correspondences between body parts and individual robots. We contribute an investigation of the influence on embodiment of swarm robot-specific factors derived from these characteristics, focusing on a hand.
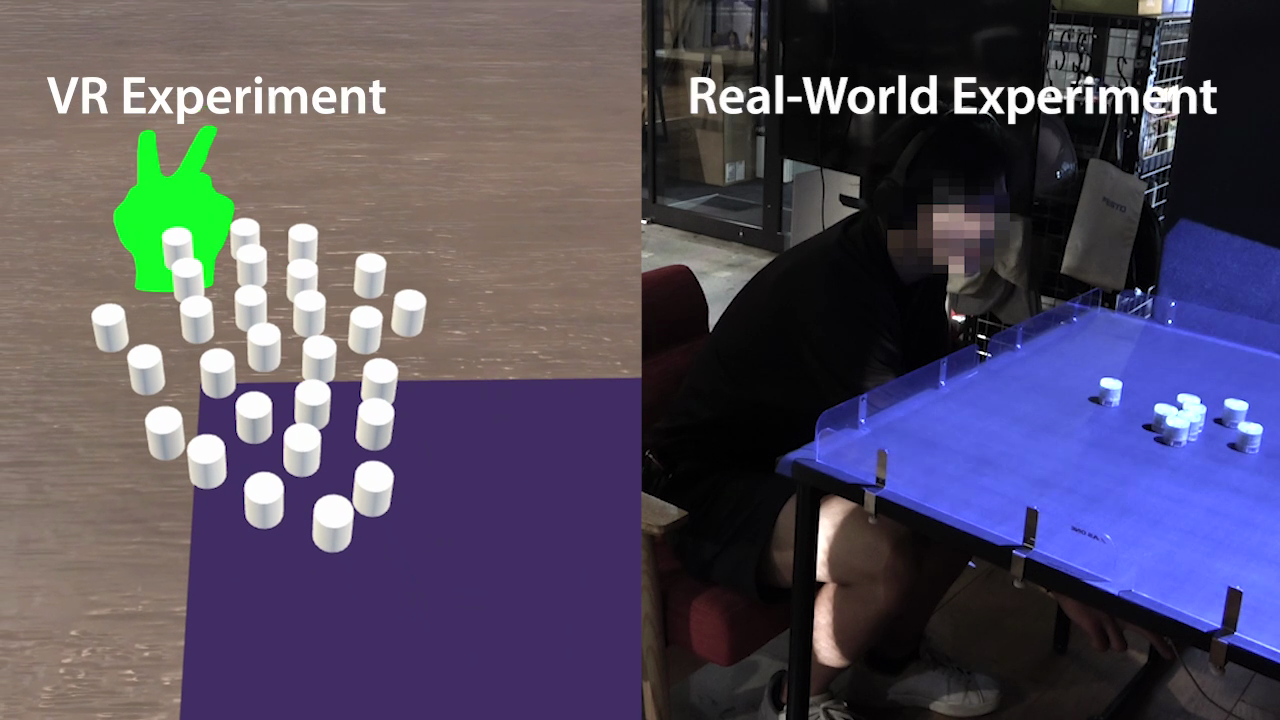
Our paper is the first to examine these factors through virtual reality (VR) and real-world robot studies to provide essential design considerations and applications of embodied swarm robots. Through quantitative and qualitative analysis, we identified a system configuration to achieve the embodiment of swarm robots.
Application #
The main application of Swarm Body is physical telepresence, where embodied swarm robots facilitate physical interaction with remote people and environments. The operator can control Swarm Body projected on their table as if manipulating their own hands. The other person can physically interact with the operator through Swarm Body.
Swarm Body expands the design space of physical telepresence, offering unique characteristics such as robustness, flexibility, and scalability to the human body.
Robot - maru #
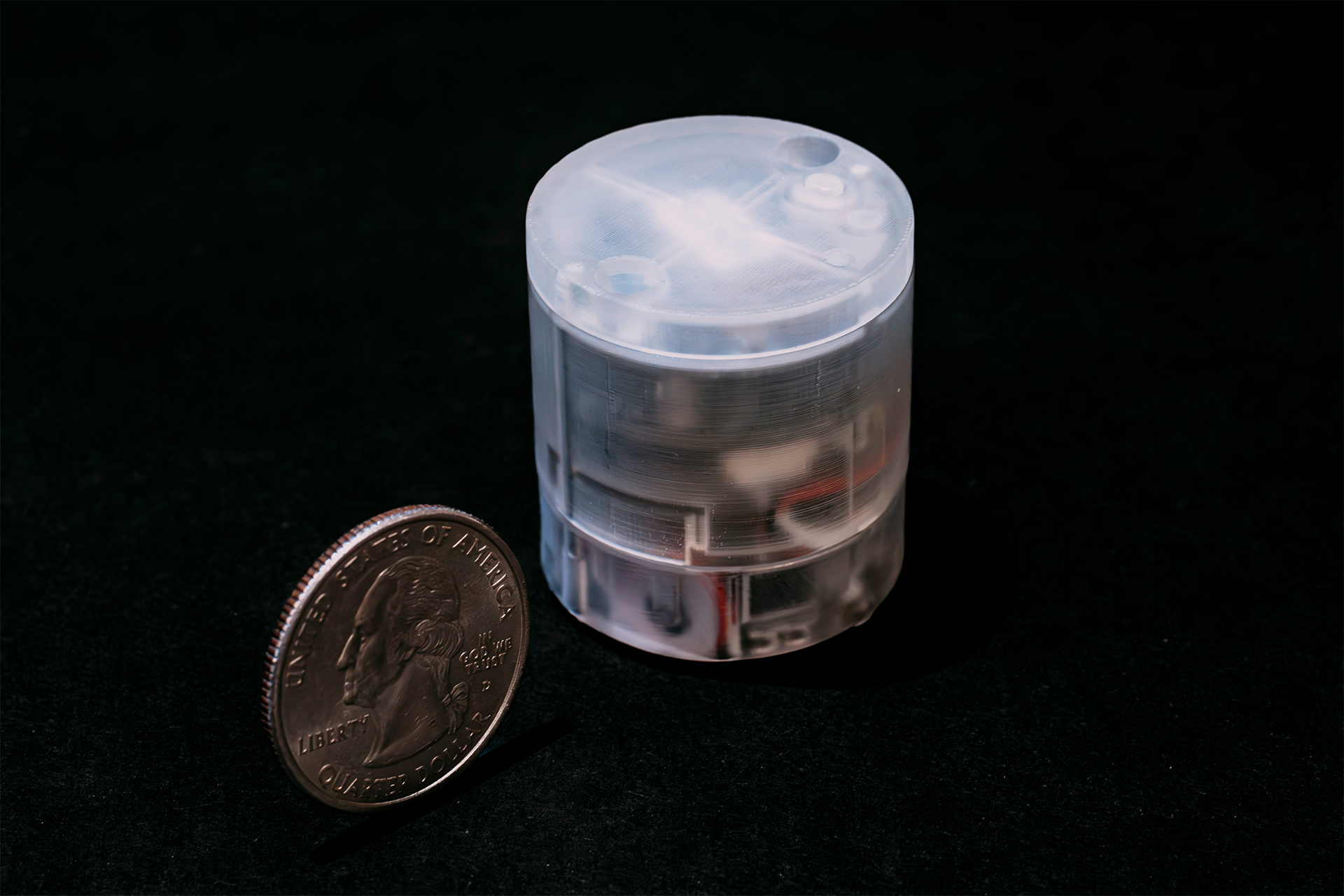
We developed custom-made swarm robots named “maru” to conduct an embodiment experiment in the real world. The hardware and software were newly designed for this purpose. The information of maru can be available on this page and information about the robot’s software and hardware is available on GitHub.

Publications #
- Sosuke Ichihashi, So Kuroki, Mai Nishimura, Kazumi Kasaura, Takefumi Hiraki, Kazutoshi Tanaka, and Shigeo Yoshida. 2024. Swarm Body: Embodied Swarm Robots. In Proceedings of the CHI Conference on Human Factors in Computing Systems (CHI ’24), May 11–16, 2024, Honolulu, HI, USA. ACM, New York, NY, USA, 19 pages. https://doi.org/10.1145/3613904.3642870
Awards and Honors #
- CHI 2024 Interactivity Popular Choice Honorable Mention, 16 May 2024.
Contributors #
-
Kazumi Kasaura
-
Shigeo Yoshida
Acknowledgements #
We thank all of our participants for their time and invaluable feedback. Our special thanks go to Zendai Kashino, Masahiko Inami, and researchers at The University of Tokyo’s Information Somatics Lab for their discussions. We also thank Karakuri Products, Inc. and Noura Howell and her students at Georgia Institute of Technology for their wonderful help. This work is partially supported by JST AIP Acceleration Research JPMJCR23U2, Japan.